Albert Einstein,
“Gerçekten değerli olan tek şey, sezgidir”
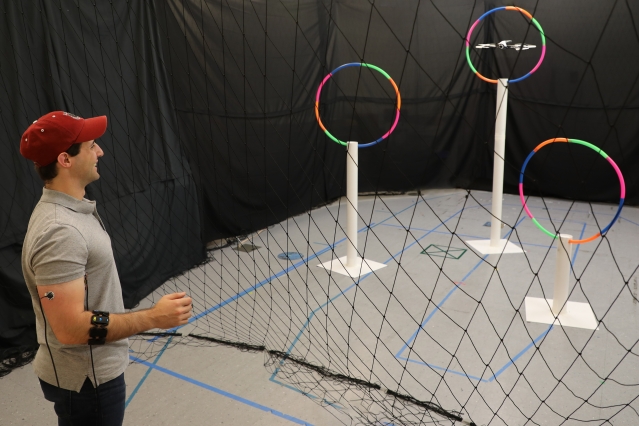
Ancak sezgiselliği öğretmek zordur – özellikle bir makineye. Bunu geliştirmek isteyen MIT’in Bilgisayar Bilimi ve Yapay Zeka Laboratuarı’ndan (CSAIL) bir ekip bizi daha kusursuz insan-robot işbirliğine yaklaştıran bir yöntem buldu. “Conduct-A-Bot” adı verilen sistem, bir robotun hareketini yönlendirmek için giyilebilir sensörlerden gelen insan kas sinyallerini kullanır.
İnsanlar ve makineler arasında kesintisiz iletişimi sağlamak için, kas sinyallerini ve hareketlerini ölçmek için biseps, triseps ve önkollara elektromiyografi ve hareket sensörleri takılır. Algoritmalar daha sonra çevrimdışı kalibrasyon veya kullanıcı başına eğitim verisi olmadan hareketleri gerçek zamanlı olarak tespit etmek için sinyalleri işler.
Sensörlerin kolların yaptığı döngüsel hareketleri, yumruk sıkmayı, kolları germek gibi eylemleri tespit ederek drone’u sola, sağa, yukarı, aşağı ve ileri hareket ettirebilir ve dönmesine veya durmasına izin verebilir.




{kind=link}